Vergleich
Yocto für das Chip-Bring-up. MOS4 für die Anwendungsoberfläche.
MOS4 ersetzt Yocto nicht. mos-distro ist der Bundle-Generator und die Anwendungslaufzeit, die auf dem von Yocto produzierten Image läuft — Supervisor, typisiertes IPC, OTA, Observability und 52 Micro Services. Komplementäre Schichten.
Schichtgrenze
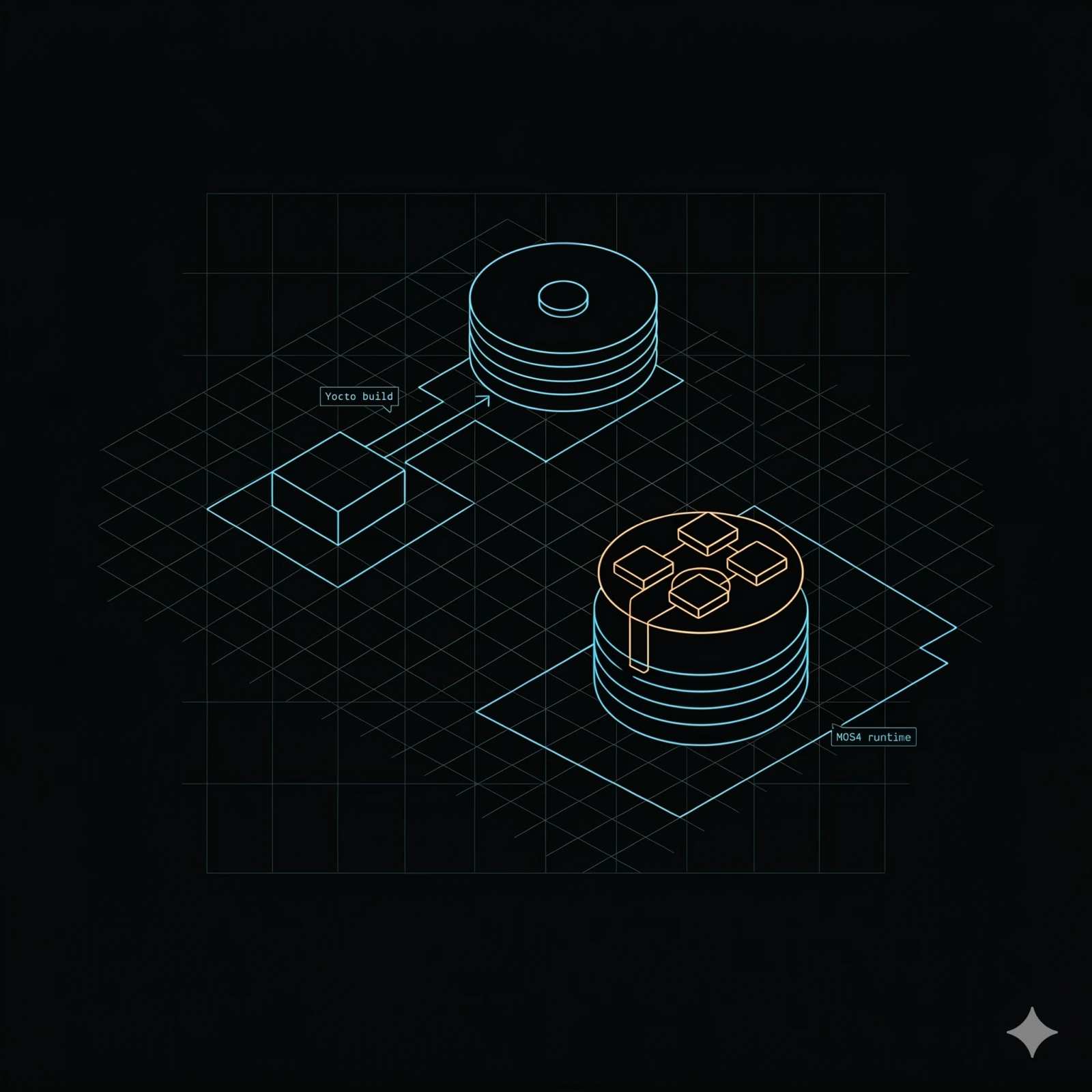
Yocto baut. MOS4 läuft.
Yocto produziert das Linux-Image. MOS4 ist die Anwendungslaufzeit-Schicht, die auf diesem Image läuft. Drei unterschiedliche Schichten: Yocto-Build-System unten, Linux-Image in der Mitte, MOS4-Anwendungslaufzeit oben.
flowchart TB
subgraph App["MOS4 — Anwendungslaufzeit-Schicht"]
M1[Micro Services · Supervisor · OTA pro Service · Observability]
end
subgraph Img["Linux-Image (Yocto-produziert)"]
L1[Kernel · Userland · systemd]
end
subgraph Y["Yocto-Build-System"]
Y1[bitbake · poky · meta-*-Schichten · BSPs]
end
Y1 -->|produziert| L1
L1 -->|führt aus| M1
mos-distro liest ein bundle.toml-Manifest und einen Cargo-Workspace und generiert
dann ein eigenständiges Bundle — Monolith-Binary, Konfig, Datendateien — das auf dem
Yocto-produzierten Image installiert wird. Es ersetzt bitbake, poky oder Meta-Schichten nicht.1
Gegenüberstellung
Fähigkeitsvergleich.
Quelle — Yocto von yoctoproject.org ; MOS4 von der MOS4-Architekturseite. Bootzeit-Zahlen mit Fußnote bei [3].
Basis-Images
Yocto, Debian und buildroot — alle unterstützt.
cargo distro erzeugt Bundles, die auf Yocto-produzierten, Debian-basierten und buildroot-basierten
Images installiert werden. MOS4 ersetzt die bestehende Image-Build-Pipeline nicht. Yocto ist der
häufigste Produktionspfad; Debian und buildroot sind bestätigte Alternativen.2
FAQ
Die Fragen, die wir am häufigsten hören.
-
Ersetzt MOS4 Yocto, bitbake oder Meta-Layer?
Nein. MOS4 ist die Anwendungslaufzeit-Schicht, die auf dem von Yocto erzeugten Image läuft. Yocto produziert Kernel und Userland; MOS4 ergänzt darüber den Service-Supervisor, typisiertes IPC, OTA, Observability und Fahrzeug-Domänen-micro services. Die beiden ergänzen sich.
-
Gibt es eine meta-mos-Schicht?
Ja — Munic pflegt eine Meta-Schicht, die MOS4-micro services auf der richtigen Yocto-Schicht einbindet, kompatibel mit bestehenden BSP- und Distro-Schichten. Der Zugang ist an eine Evaluierungsvereinbarung gebunden. <a href="/de/contact?topic=yocto-eval">Mit Engineering sprechen</a>.
-
Ersetzt MOS4 systemd?
Nein. systemd bootet die Plattform; MOS4 läuft als systemd-Unit (installiert unter /mnt/user/start.sh, übernommen bei Runlevel 5) und beaufsichtigt Anwendungs-micro services darüber. Beide koexistieren.
-
Kann ich Micro Services aktualisieren, ohne das Image neu zu flashen?
Ja — mos-update führt Delta-OTA pro Micro Service durch: Download, SHA-256-Verifizierung, Ed25519-Validierung, Delta-Anwendung, A/B-Partitions-Commit, automatischer Rollback per Bootcount. Yocto-Style-Vollimage-Updates bleiben für Kernel- und Basis-Image-Änderungen verfügbar.
-
Welche Build-Umgebungen werden für Cross-Kompilierung unterstützt?
Yocto-, Debian-basierte und buildroot-basierte Images werden alle unterstützt. Auf macOS erledigt OrbStack die modem-Klasse-Cross-Kompilierung; andere Ziele erfordern einen Linux-Build-Host oder OrbStack. Der OE-SDK-Sysroot unter /opt/oecore-cortexa7/ bleibt für ARM-Soft-Float-Cross-Kompilierung auf modem-Klasse-Hardware erforderlich.
-
Wie evaluiere ich MOS4 auf Yocto-Hardware, bevor ich mich auf meta-mos festlege?
<a href="/de/contact?topic=yocto-eval">Mit Engineering sprechen</a>. Der schnellste On-Target-Pfad wird pro Programm bewertet.
Fußnoten
Vergleichsquellen.
-
Yocto-Project-Terminologie —
bitbake,pokyund Meta-Schichten sind die dokumentierten Build-System-Primitive. mos-distro liestbundle.toml+ einen Cargo-Workspace auf der Anwendungsschicht. Quelle: yoctoproject.org; MOS4 von /de/platform/architecture. - Basis-Image-Abdeckung verifiziert gegen die mos-distro-CI-Matrix: Yocto-produzierte ARM-Images, Debian-basierte Images und buildroot-basierte Images führen jeweils ein installiertes MOS4-Bundle in der Pipeline pro Commit aus.
- Bootzeit auf dem Referenzprofil der modem-Klasse (1,6 s First-App-Ready, 28,4 MB stationäres RSS) gemessen auf dem Referenzboard der modem-Klasse. Methodik: Cold-Boot bis zum ersten erfolgreichen EventBus-Service-Call.
Bringen Sie die Yocto-Schichten mit.
Ein 30-minütiges Gespräch mit dem Engineering. Bringen Sie die Meta-Schichten mit; das Engineering platziert MOS4 dort, wo es passt.