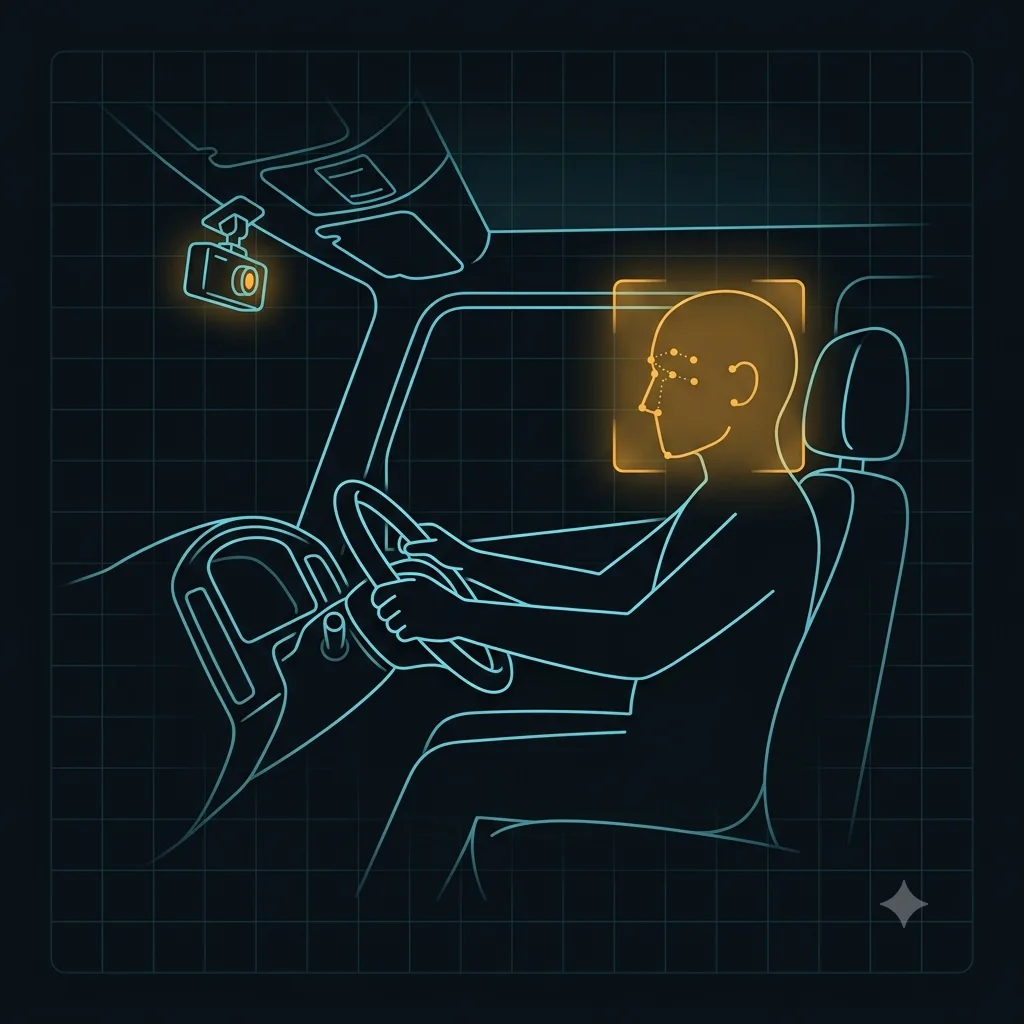
Müdigkeit & Erschöpfung
Lidschluss- und Kopfnick-Muster werden auf der Kabinen-Optik bewertet und danach gewichtet, wie lange der Fahrer bereits unterwegs ist, sodass eine lange Nachtschicht die Empfindlichkeit erhöht. Die Inferenz läuft auf dem Gerät — der Kabinen-Feed verlässt das Fahrzeug nie.