Solutions · Maschinen
Ein Off-Highway-Maschinenprogramm ausliefern.
Ein Connected-Machine-OS für Off-Highway-, ISOBUS- und Agrar-Programme — gewählt für fünfzehnjährige Lebenszyklus-Erwartungen. Liefert J1939, ISOBUS, Modbus, Geofencing, 1-Wire-Sensoren, Kamera-Capture und A/B-OTA out of the box. Das Engineering-Team schreibt die Maschinen-Anwendung — nicht das OS oder die Protokoll-Infrastruktur.
Die Programm-Constraint
Die Maschine überlebt das OS.
Off-Highway- und Agrarmaschinen werden fünfzehn Jahre lang ausgeliefert. Die OS-Wahl trägt Beschaffungsfilter, Support-Fenster und Cyber-Resilience-Act-(CRA-)Compliance über diesen Horizont. MOS4 liefert die Software-Bill-of-Materials (SBOM), die Security-Scan-Pipeline und die Compliance-Artefakte aus, die der Einkauf erwartet.
Wie MOS4 passt
Drei Fähigkeiten für ein Maschinenprogramm.
J1939, ISOBUS und Modbus aus einer Runtime
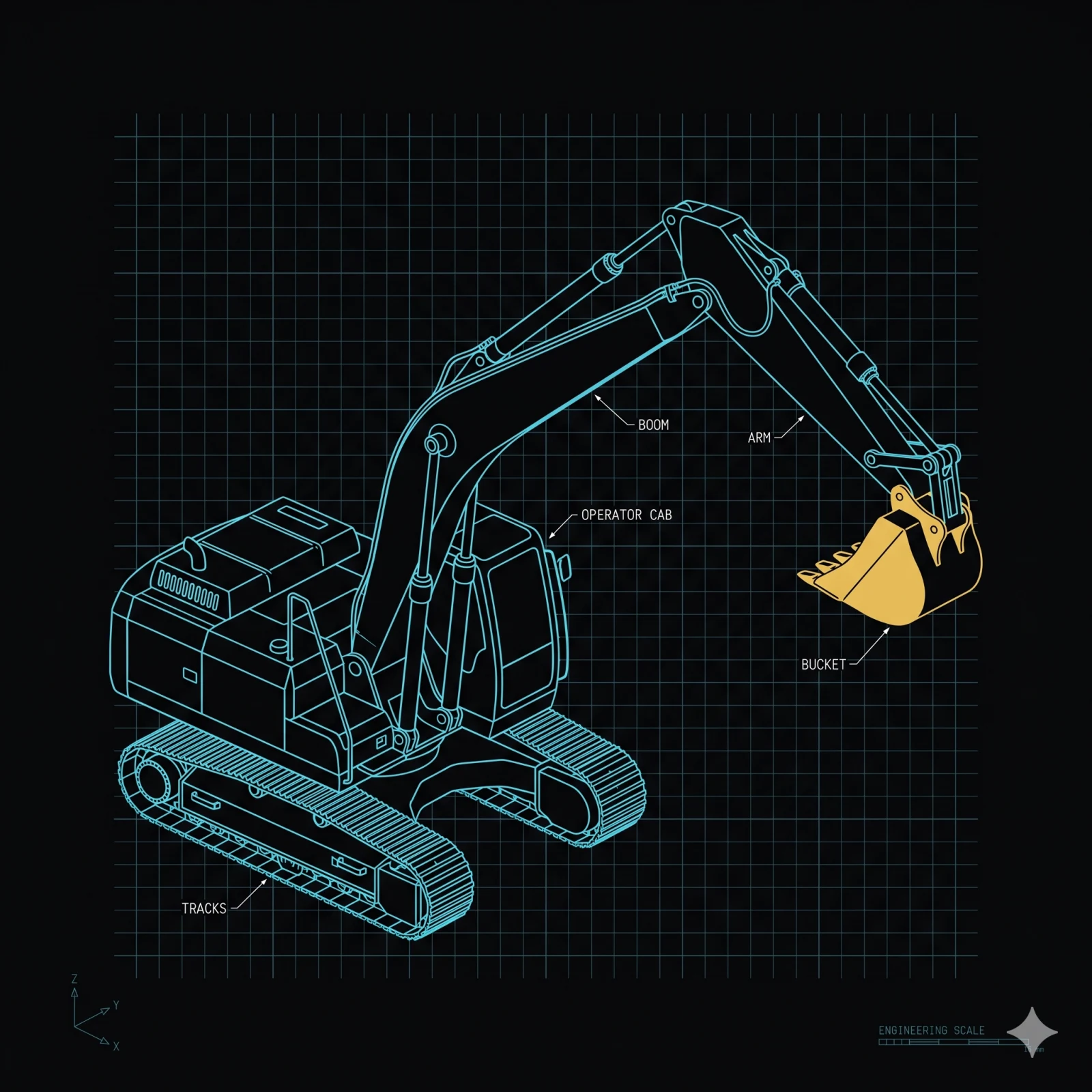
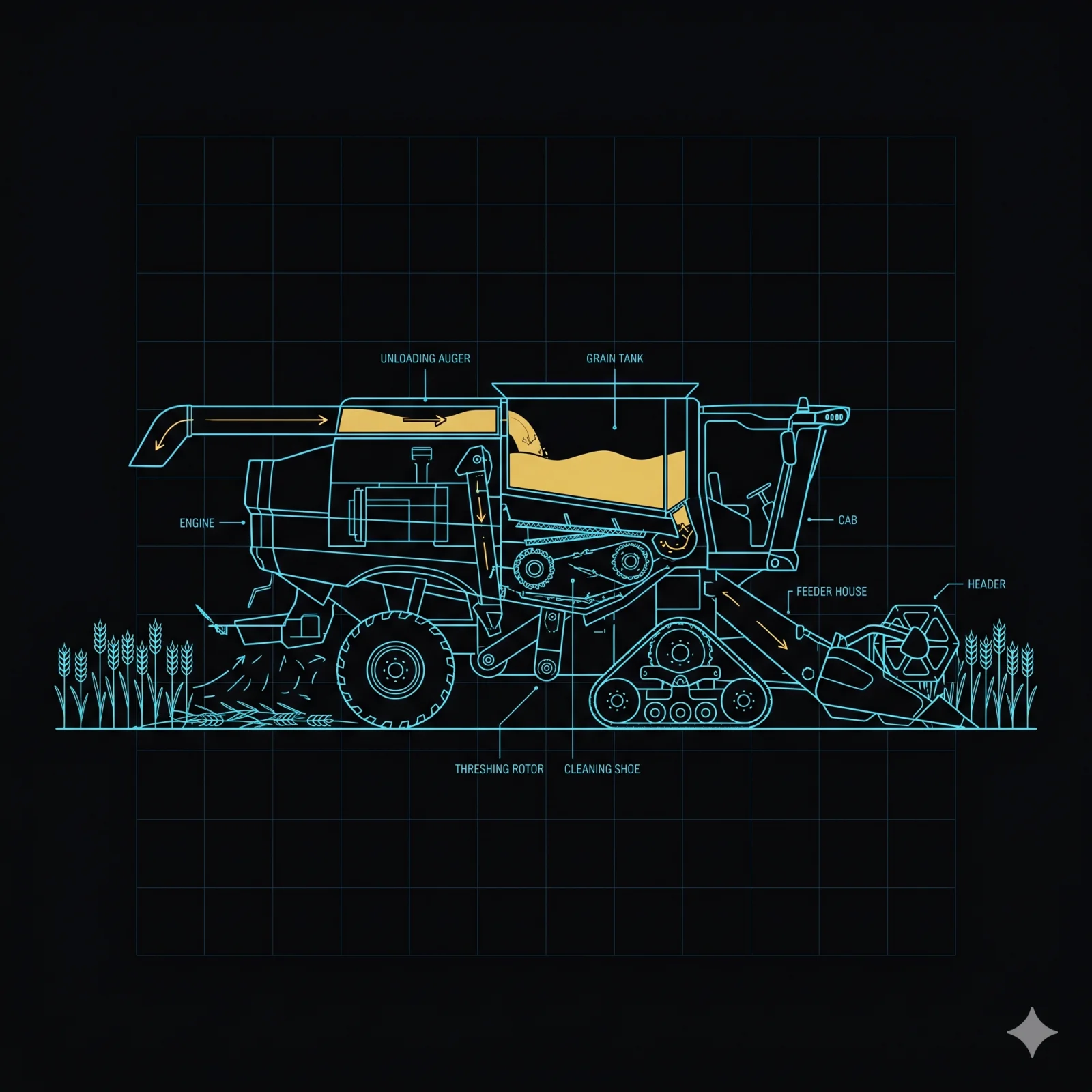
MOS4 betreibt J1939, ISOBUS, Modbus, CANopen und CAN-FD gleichzeitig auf einem Gerät. Die ISOBUS-(ISO 11783-)Unterstützung deckt die Signal-Akquise ab — read-only. Stack-Definitionen sind Datendateien; das Hinzufügen einer neuen Parameter-Gruppe (PGN) oder eines Signals (SPN) erfordert keine Firmware-Änderung.
On-Device-Geofencing — 1.000+ Zonen
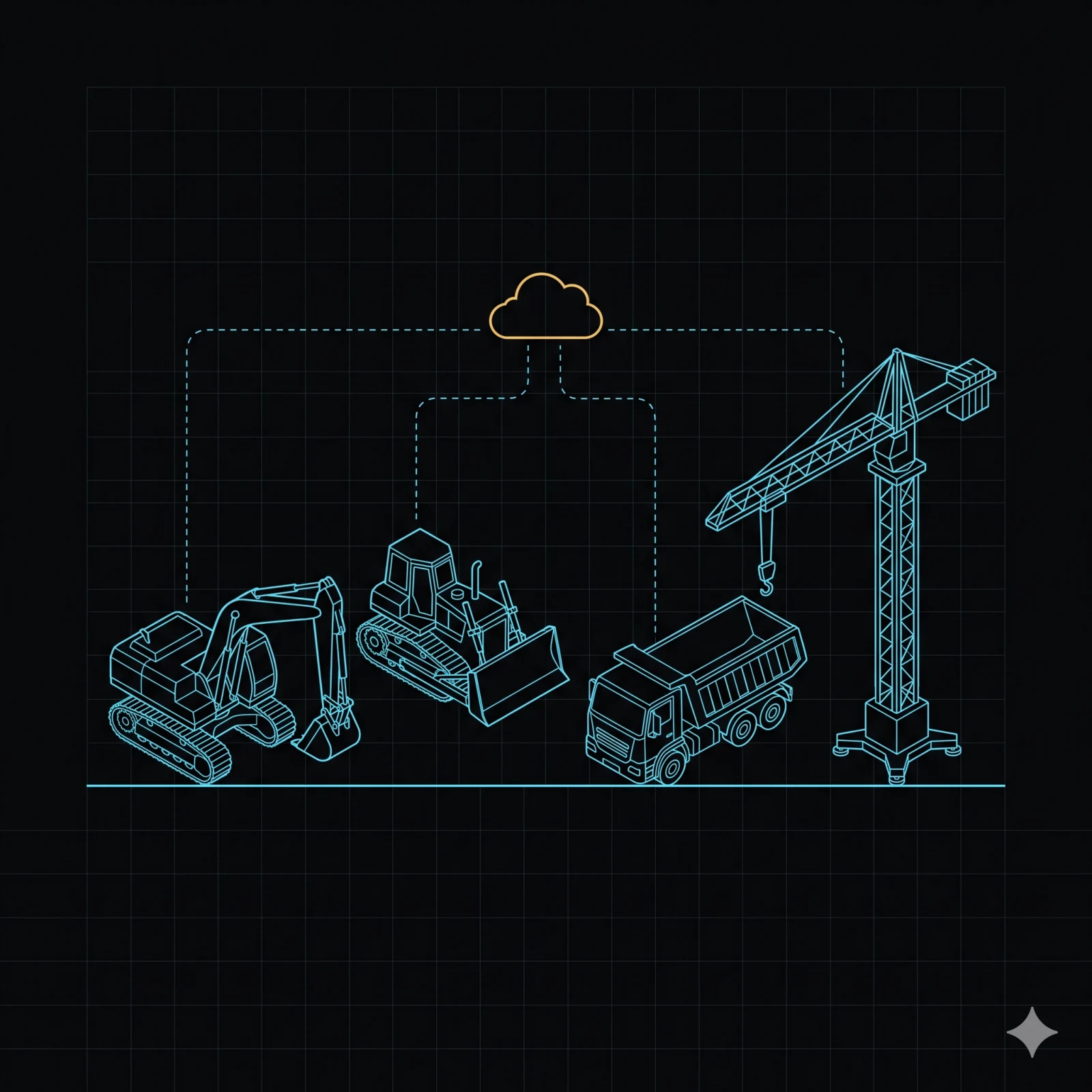
Der Geofencing-micro service wertet Zonen-Mitgliedschaft an der Edge aus — kein Cloud-Roundtrip pro Position-Fix. Entry-, Exit- und Dwell-Events feuern lokal; Zonenkarten überleben Reboots und werden zur Laufzeit ohne Reflash aktualisiert.
Bediener-Vision ohne CPU-Overhead
Fünf Kamera-Inputs (MIPI-CSI, GMSL2, USB UVC, RTSP/ONVIF, WebRTC). Kamera, GPU und NPU teilen sich Speicher direkt — Frames laufen zur KI-Inferenz und Aufzeichnung, ohne dass die CPU Pixeldaten kopiert.
Protokoll-Abdeckung
In obdstacks-v2 ausgelieferte Bus-Protokolle.
Alle Protokolle teilen sich eine service obdstacks-v2 -Runtime.
J1939 und ISOBUS laufen gleichzeitig auf demselben Gerät ohne separate Hardware.
22 Produktions-Stacks werden bei jedem CI-Push validiert ausgeliefert.
| Protokoll | Bus | Einsatz auf der Maschine |
|---|---|---|
| J1939 | CAN | Powertrain PGN/SPN, Fehlercodes |
| ISOBUS | CAN | Anbaugeräte-Signal-Akquise (read-only) |
| Modbus RTU | RS-485 seriell | Drittanbieter-Anbauten, PLCs |
| Modbus TCP/MBAP | Ethernet | Festinstallierte Subsysteme |
| CANopen | CAN | Hydraulik- / Elektroaktuator-Knoten |
| CAN-FD | CAN | High-Bandwidth-Sensorbusse |
| ISO-TP | CAN | UDS-Diagnose-Sessions |
Die ISOBUS-Unterstützung deckt ausschließlich die Signal-Akquise ab — read-only. VT-Display-Authoring ist nicht Teil des Micro Services.
Plattform-Metriken
Zentrale Kennzahlen.
Referenzarchitektur
Ein Maschinenprogramm auf MOS4.
Anonymer Proof-Point
Landmaschinenhersteller · regionaler Rollout.
Ein Landmaschinenhersteller liefert MOS4 über eine regionale Flotte aus und dekodiert ISOBUS (ISO 11783) und J1939 gleichzeitig. Geofencing-Grenzerkennung und 1-Wire-Temperatur-Akquise laufen auf demselben Gerät. Compliance-Dokumentation und Software-Bills-of-Materials (SBOM) werden out of the box ausgeliefert.
Referenz unter NDA · Engineering-vermitteltes Referenzgespräch anfragen
ROS2-Integration
ROS2-Nodes ohne Neuschreiben gehostet.
Der ROS2-Bridge-micro service verbindet jeden unveränderten ROS2-Node ohne Code-Änderungen mit dem MOS4-Event-Bus. Bestehende ROS2-Nodes laufen in isolierten Containern neben CAN, GNSS, Geofencing und Remote Care. Die Bridge übersetzt ROS2-(DDS-)Nachrichten bidirektional vom und zum typisierten MOS4-Event-Bus.
FAQ
Häufig gestellte Fragen
-
Können J1939 und ISOBUS gleichzeitig laufen?
Ja. MOS4 betreibt mehrere Protokoll-Stacks gleichzeitig auf denselben physischen Schnittstellen von einem Gerät — J1939 und ISOBUS teilen sich dieselbe Runtime ohne separate Hardware.
-
Was deckt die ISOBUS-Unterstützung ab?
Signal-Akquise (ISO 11783) — read-only. Virtual-Terminal-(VT-)Display-Authoring ist nicht Teil des Micro Services.
-
Wie funktioniert die Precision-Agriculture-Positionierung?
Der GNSS-Service unterstützt Real-Time-Kinematic-(RTK-)Positionierung, wenn er mit einem RTK-fähigen Empfänger gekoppelt ist. Inertiale Sensor-Fusion (ESF) speist CAN-Radimpulse für Dead-Reckoning durch Signalausfälle an Feldrändern. Hardware-Details und SKUs auf munic.io.
-
Wie werden Geofencing-Zonen im Feld aktualisiert?
Zonendefinitionen werden zur Laufzeit über einen Service-Aufruf aktualisiert — kein Firmware-Reflash erforderlich. Zonenkarten werden über Reboots hinweg persistiert. 1.000+ Zonen werden effizient ohne Cloud-Roundtrip pro Position-Fix ausgewertet.
-
Welche 1-Wire-Geräte werden unterstützt?
DS18B20/DS18S20-Temperatursonden, DS2438-Hygrometer, DS2401-iButton-Bediener-Credentials, DS1992-EEPROM — alle über einen Service. Andere Services konsumieren Events dieser Geräte, ohne direkt auf die Hardware zuzugreifen.
-
Wie funktioniert das Over-the-Air-Update in einem abgelegenen Feld-Deployment?
Delta-Updates mit signierten Paketen und automatischem Rollback. Ein fehlgeschlagenes Update wird automatisch zurückgerollt, ohne dass ein Feldtechniker erforderlich ist. Download über HTTP, HTTPS oder SFTP.
-
Gibt es formalen Long-Term-Support?
Kein formales LTS. Support-Fenster werden pro Programm vereinbart.
Bringen Sie die Maschinenarchitektur mit.
Protokoll-Mix, Sensortypen, Lebensdauer-Erwartungen, Silizium-Stufe. Engineering skizziert den MOS4-Fit im Call.