Compare
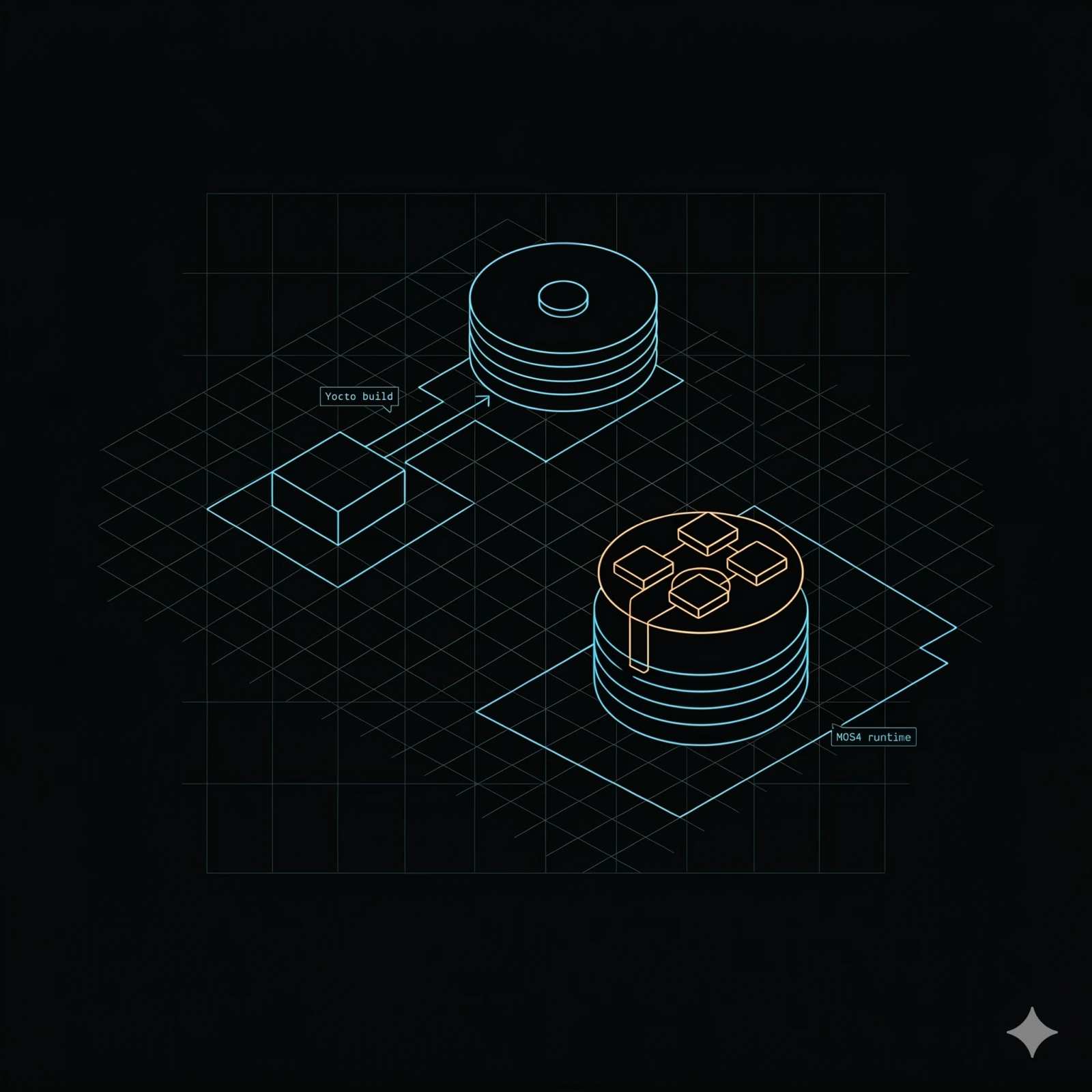
Yocto for chip bring-up. MOS4 for the application surface.
MOS4 does not replace Yocto. mos-distro is the bundle generator and application runtime that runs on the image Yocto produced — supervisor, typed IPC, OTA, observability, and 52 micro services. Complementary layers.
Layer boundary
Yocto builds. MOS4 runs.
Yocto produces the Linux image. MOS4 is the application runtime layer that runs on that image. Three distinct layers: Yocto build system at the bottom, Linux image in the middle, MOS4 application runtime at the top.
flowchart TB
subgraph App["MOS4 — application runtime layer"]
M1[Micro services · supervisor · per-service OTA · observability]
end
subgraph Img["Linux image (Yocto-produced)"]
L1[Kernel · userland · systemd]
end
subgraph Y["Yocto build system"]
Y1[bitbake · poky · meta-* layers · BSPs]
end
Y1 -->|produces| L1
L1 -->|runs| M1
mos-distro reads a bundle.toml manifest and a Cargo workspace, then generates a self-contained
bundle — monolith binary, config, data files — installed onto the Yocto-produced image. It does
not replace bitbake, poky, or meta layers.1
Side-by-side
Capability comparison.
Source — Yocto from yoctoproject.org ; MOS4 from the MOS4 architecture page. Boot-time figures footnoted at [3].
Base images
Yocto, Debian, and buildroot — all supported.
cargo distro generates bundles that install onto Yocto-produced, Debian-based, and
buildroot-based images. MOS4 does not replace the existing image build pipeline. Yocto is the most
common production path; Debian and buildroot are confirmed alternatives.2
FAQ
The questions we hear most.
-
Does MOS4 replace Yocto, bitbake, or meta layers?
No. MOS4 is the application runtime layer that runs on the image Yocto produced. Yocto produces the kernel and userland; MOS4 adds the service supervisor, typed IPC, OTA, observability, and vehicle-domain micro services above that base. The two are complementary.
-
Is there a meta-mos layer?
Yes — Munic maintains a meta layer that pulls MOS4 micro services in at the correct Yocto layer, compatible with existing BSP and distro layers. Access is gated under an evaluation agreement. <a href="/contact?topic=yocto-eval">Talk to engineering</a>.
-
Does MOS4 replace systemd?
No. systemd boots the platform; MOS4 runs as a systemd unit (installed at /mnt/user/start.sh, picked up at runlevel 5) and supervises application micro services above it. The two coexist.
-
Can I update micro services without reflashing the image?
Yes — mos-update runs per micro service delta OTA: download, SHA-256 verify, Ed25519 validate, delta apply, A/B partition commit, automatic rollback via bootcount. Yocto-style full-image updates remain available for kernel and base-image changes.
-
What build environments are supported for cross-compilation?
Yocto, Debian-based, and buildroot-based images are all supported. On macOS, OrbStack handles modem-class cross-compilation; other targets require a Linux build host or OrbStack. The OE SDK sysroot at /opt/oecore-cortexa7/ remains required for ARM soft-float cross-compilation on modem-class hardware.
-
How do I evaluate MOS4 on Yocto hardware before committing to meta-mos?
<a href="/contact?topic=yocto-eval">Talk to engineering</a>. The quickest on-target path is evaluated per programme.
Footnotes
Comparison sources.
-
Yocto Project terminology —
bitbake,poky, and meta layers are the documented build-system primitives. mos-distro readsbundle.toml+ a Cargo workspace at the application layer. Source: yoctoproject.org; MOS4 from /platform/architecture. - Base-image coverage verified against the mos-distro CI matrix: Yocto-produced ARM images, Debian-based images, and buildroot-based images each run an installed MOS4 bundle in the per-commit pipeline.
- Modem-class reference profile boot timing (1.6 s first-app-ready, 28.4 MB steady-state RSS) measured on the modem-class reference board. Methodology: cold boot to first successful EventBus service call.
Bring the Yocto layers.
A 30-minute call with engineering. Bring the meta-layers; engineering will place MOS4 where it fits.