Comparatif
MOS4 vs Zephyr
L’axe de comparaison est la classe silicium, pas le nombre de fonctionnalités. Zephyr est un noyau temps réel de classe MCU. MOS4 est un runtime applicatif Linux embarqué. Là où Zephyr s’arrête, MOS4 commence.
Classe silicium
Domaines différents, silicium différent.
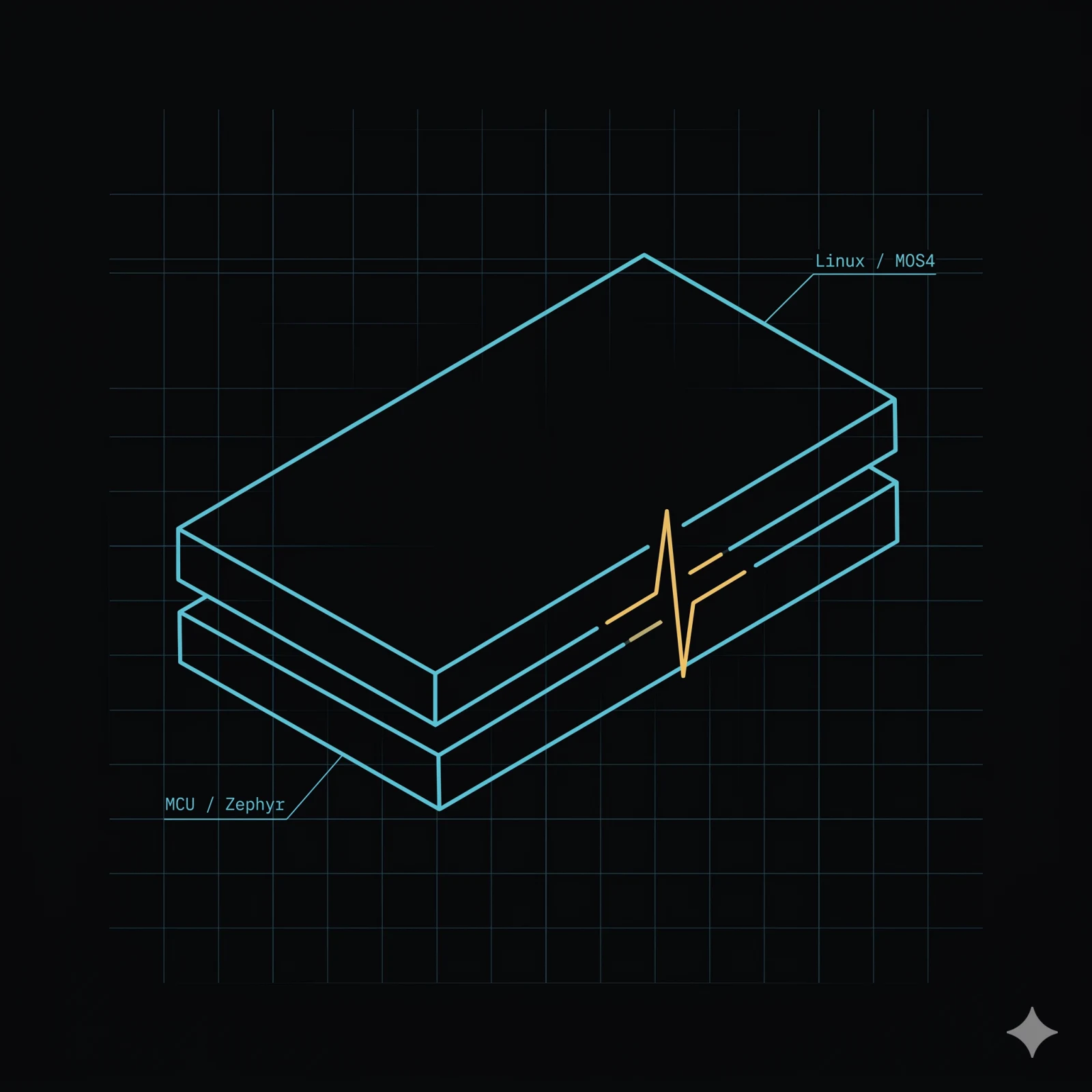
Zephyr fournit la couche RTOS pour MCU avec tâches, IPC, drivers et ordonnanceur temps réel. MOS4 fournit la couche runtime applicatif au-dessus du noyau Linux sur un SoC de classe Linux. Les deux peuvent coexister en co-processeur et cœur applicatif, reliés par l’IPC SubscribeCanFrames.
flowchart TB
subgraph MOS4["MOS4 — runtime applicatif (SoC classe Linux)"]
M1[Superviseur de composants · EventBus · OTA]
M2[obdstacks-v2 · GNSS · modem · inférence IA]
M3[Observabilité · mos-update · conteneurs]
end
subgraph Linux["Noyau Linux + userland"]
end
subgraph Zephyr["Zephyr — RTOS pour MCU"]
Z1[Tâches · IPC · drivers · ordonnanceur temps réel]
end
MOS4 --> Linux
Zephyr -."IPC co-processeur (SubscribeCanFrames)".-> MOS4
Modèle de coexistence : Zephyr sur le co-processeur MCU gère le travail temps réel
déterministe (interruption CAN sub-milliseconde) ; MOS4 sur le cœur applicatif Linux reçoit
les trames décodées via le service de streaming SubscribeCanFrames sur le lien inter-processeurs
et gère les services, l’OTA flotte et l’observabilité.
Côte à côte
Comparaison des capacités.
Source — colonne Zephyr depuis zephyrproject.org ; MOS4 depuis /fr/architecture.
Note : les empreintes RAM et flash ne sont pas comparées ci-dessus. Zephyr et MOS4 s’exécutent sur des classes silicium différentes avec des primitives OS différentes. Comparer les empreintes serait le mauvais axe.
FAQ
Les questions qu’on nous pose le plus.
-
Puis-je exécuter Zephyr aux côtés de MOS4 ?
Oui — de nombreux déploiements utilisent Zephyr sur un co-processeur (un MCU qui gère les interruptions CAN temps réel déterministes) et MOS4 sur le cœur applicatif. Zephyr assume la fonction noyau ; MOS4 gère les services, l’OTA et l’intégration de flotte au-dessus de la frontière noyau/userspace Linux.
-
MOS4 nécessite-t-il Linux ?
Oui. MOS4 est un runtime applicatif de classe Linux. La cible minimale est un processeur applicatif de classe modem qui exécute un noyau Linux. Pour les programmes MCU-only, Zephyr ou FreeRTOS sont le bon choix.
-
En quoi le niveau silicium diffère-t-il ?
Zephyr cible des composants de classe MCU (cœurs de microcontrôleurs 32 bits, RISC-V et équivalents). MOS4 démarre sur des processeurs applicatifs de classe modem capables d’exécuter Linux et monte jusqu’au matériel de classe IA. Ce sont des classes matérielles différentes avec des primitives OS différentes — les empreintes ne sont pas comparables.
-
Où Zephyr s’arrête-t-il et où MOS4 commence-t-il ?
À la frontière noyau/userspace sur un SoC de classe Linux. Zephyr ne fournit pas de superviseur de micro services, d’OTA flotte, de pile d’observabilité ou de stacks de protocoles véhicule au niveau applicatif — ce sont des primitives MOS4.
-
Quels sont les chiffres MOS4 sur silicium de classe modem ?
28,4 Mo de RSS en régime établi, 1,6 s jusqu’au premier service applicatif prêt, 200 ms de cold-start de composant sur le profil de référence de classe modem. Ce sont des chiffres absolus pour cette classe matérielle — pas une comparaison avec Zephyr, qui s’exécute sur une classe d’OS entièrement différente.
-
Quand Zephyr reste-t-il le bon choix ?
Pour les cœurs de microcontrôleurs 32 bits, les MCU RISC-V ou toute cible bare-metal ou RTOS. Dès que la latence ISR déterministe sub-milliseconde est la contrainte principale et qu’un noyau Linux n’est pas disponible ou nécessaire, Zephyr est la bonne réponse.
Décidez d’abord la classe silicium.
Un appel de 30 minutes avec l’ingénierie. Nous dimensionnons le SoC ensemble — classe MCU, classe modem Linux, classe compute ou classe IA.