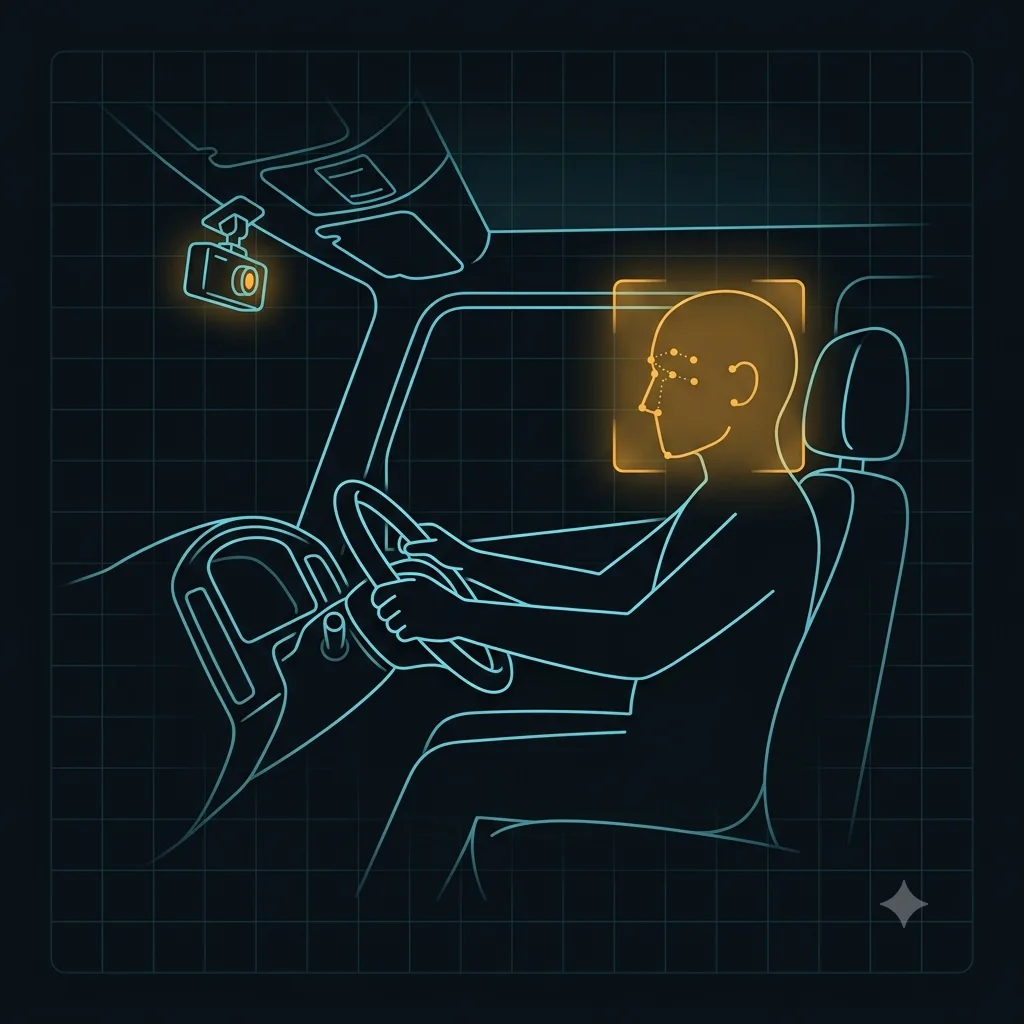
Somnolence et fatigue
Les schémas de fermeture des yeux et de dodelinement sont évalués sur l’optique cabine et pondérés par le temps déjà passé au volant, de sorte qu’un long service de nuit augmente la sensibilité. L’inférence s’exécute sur le boîtier — le flux cabine ne quitte jamais le véhicule.