Comparativa
MOS4 vs Zephyr
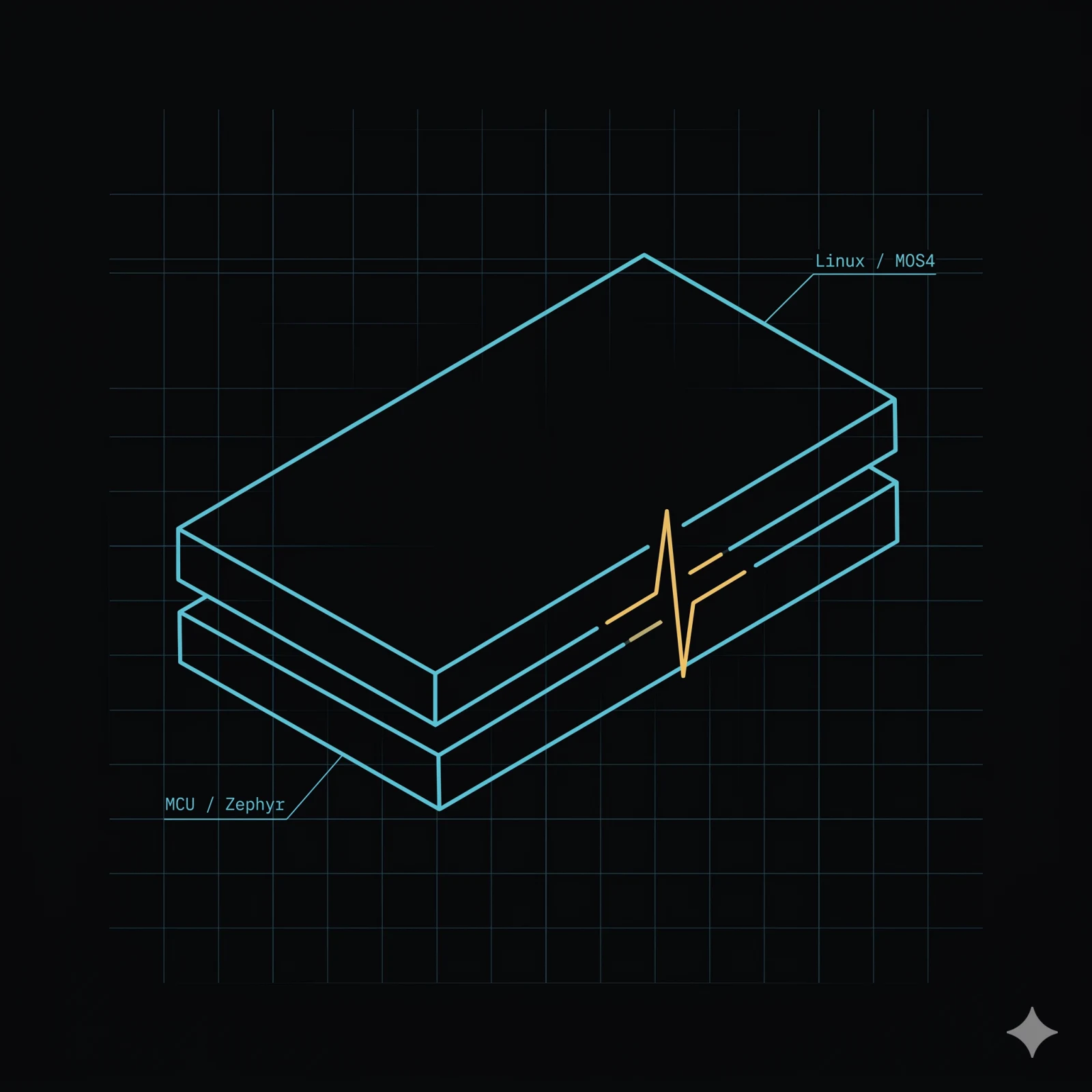
El eje de la comparación es la clase de silicio, no el conteo de funciones. Zephyr es un kernel en tiempo real clase MCU. MOS4 es un runtime de aplicación para Linux embebido. Donde termina Zephyr, empieza MOS4.
Clase de silicio
Dominios distintos, silicio distinto.
Zephyr proporciona la capa RTOS para MCU con tareas, IPC, drivers y un scheduler en tiempo real. MOS4 proporciona la capa de runtime de aplicación sobre el kernel Linux en un SoC clase Linux. Los dos pueden coexistir como coprocesador y core de aplicación, conectados vía IPC SubscribeCanFrames.
flowchart TB
subgraph MOS4["MOS4 — runtime de aplicación (SoC clase Linux)"]
M1[Supervisor de componentes · EventBus · OTA]
M2[obdstacks-v2 · GNSS · módem · inferencia IA]
M3[Observabilidad · mos-update · contenedores]
end
subgraph Linux["Kernel Linux + userland"]
end
subgraph Zephyr["Zephyr — RTOS para MCU"]
Z1[Tareas · IPC · drivers · scheduler tiempo real]
end
MOS4 --> Linux
Zephyr -."IPC coprocesador (SubscribeCanFrames)".-> MOS4
Modelo de coexistencia: Zephyr sobre el coprocesador MCU gestiona el trabajo determinista en
tiempo real (servicio de interrupción CAN sub-milisegundo); MOS4 sobre el core Linux de
aplicación recibe tramas decodificadas vía el servicio de streaming SubscribeCanFrames
por el enlace interprocesador y gestiona los servicios, OTA de flota y observabilidad.
Cara a cara
Comparación de capacidades.
Fuente — Zephyr desde zephyrproject.org ; MOS4 desde /es/architecture.
Nota: las cifras de huella en RAM y flash no se comparan más arriba. Zephyr y MOS4 corren en clases de silicio distintas con primitivas de OS distintas. Comparar huellas sería el eje equivocado.
FAQ
Las preguntas que más oímos.
-
¿Puedo ejecutar Zephyr junto a MOS4?
Sí — muchos despliegues usan Zephyr en un coprocesador (una MCU que gestiona interrupciones CAN deterministas en tiempo real) y MOS4 en el core de aplicación. Zephyr asume la tarea a nivel de kernel; MOS4 gestiona los servicios, OTA e integración de flota por encima de la frontera kernel/userspace de Linux.
-
¿Requiere MOS4 Linux?
Sí. MOS4 es un runtime de aplicación clase Linux. El objetivo mínimo es un procesador de aplicación clase módem ejecutando un kernel Linux. Para programas solo MCU, Zephyr o FreeRTOS son la elección correcta.
-
¿Cómo difiere el nivel de silicio?
Zephyr apunta a piezas clase MCU (núcleos de microcontrolador de 32 bits, RISC-V y equivalentes). MOS4 arranca en procesadores de aplicación clase módem capaces de Linux y escala hasta hardware clase IA. Son clases de hardware distintas con primitivas de OS distintas — huellas no comparables.
-
¿Dónde termina Zephyr y empieza MOS4?
En la frontera kernel/userspace de un SoC clase Linux. Zephyr no proporciona supervisor de micro services, OTA de flota, pila de observabilidad ni pilas de protocolo vehicular a nivel de aplicación — esas son primitivas de MOS4.
-
¿Cuáles son las cifras de MOS4 en silicio clase módem?
28,4 MB de RSS en estado estacionario, 1,6 s hasta primera aplicación lista, 200 ms de arranque en frío de componente en el perfil de referencia clase módem. Son cifras absolutas para esa clase de hardware — no una comparación con Zephyr, que corre en una clase de OS distinta.
-
¿Cuándo sigue siendo Zephyr la elección correcta?
Para núcleos de microcontrolador de 32 bits, MCUs RISC-V o cualquier objetivo bare-metal o RTOS. Siempre que la latencia ISR determinista sub-milisegundo sea la restricción principal y un kernel Linux no esté disponible ni sea necesario, Zephyr es la respuesta correcta.
Decida primero la clase de silicio.
Una llamada de 30 minutos con ingeniería. Dimensionaremos el SoC juntos — clase MCU, clase módem Linux, clase compute o clase IA.