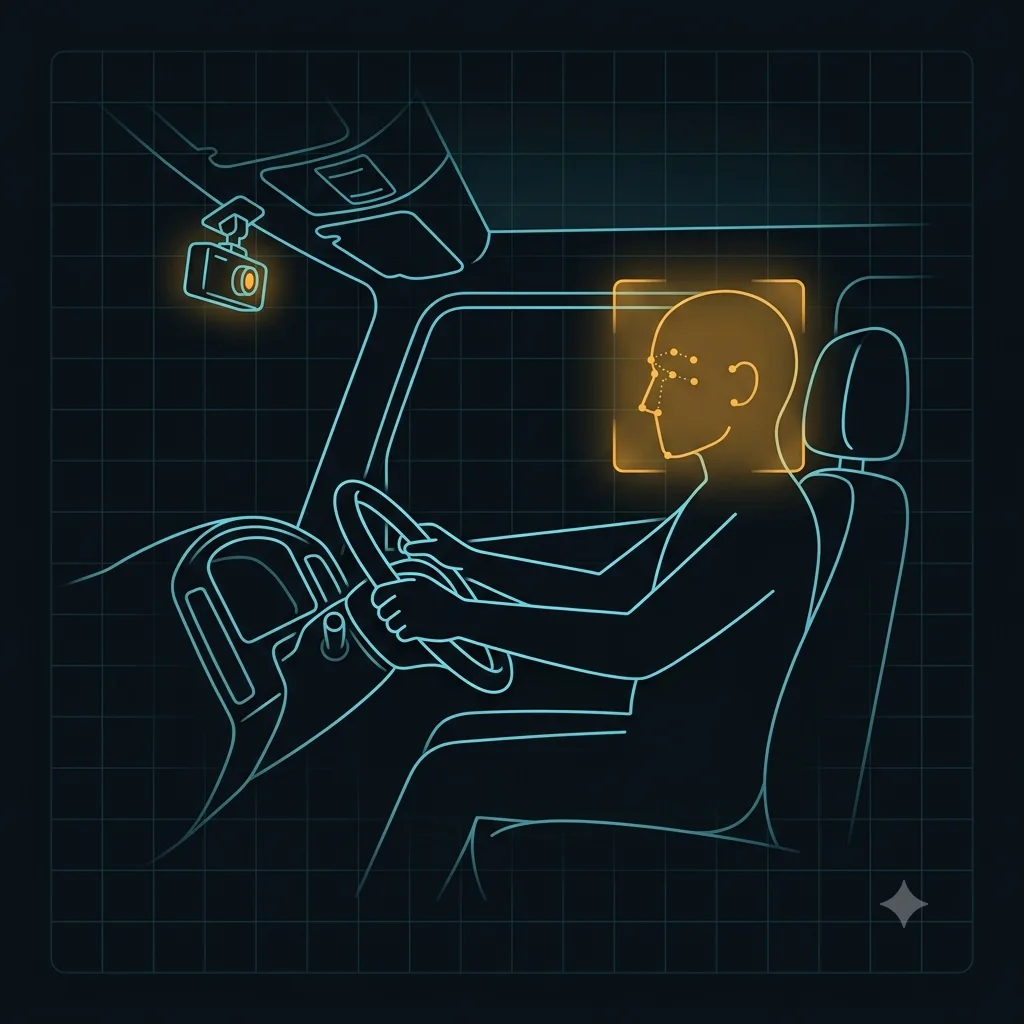
Drowsiness & fatigue
Eye-closure and head-nod patterns are scored on the in-cab optic and weighted by how long the driver has been on the road, so a long night shift raises sensitivity. Inference runs on the box — the cabin feed never leaves the vehicle.