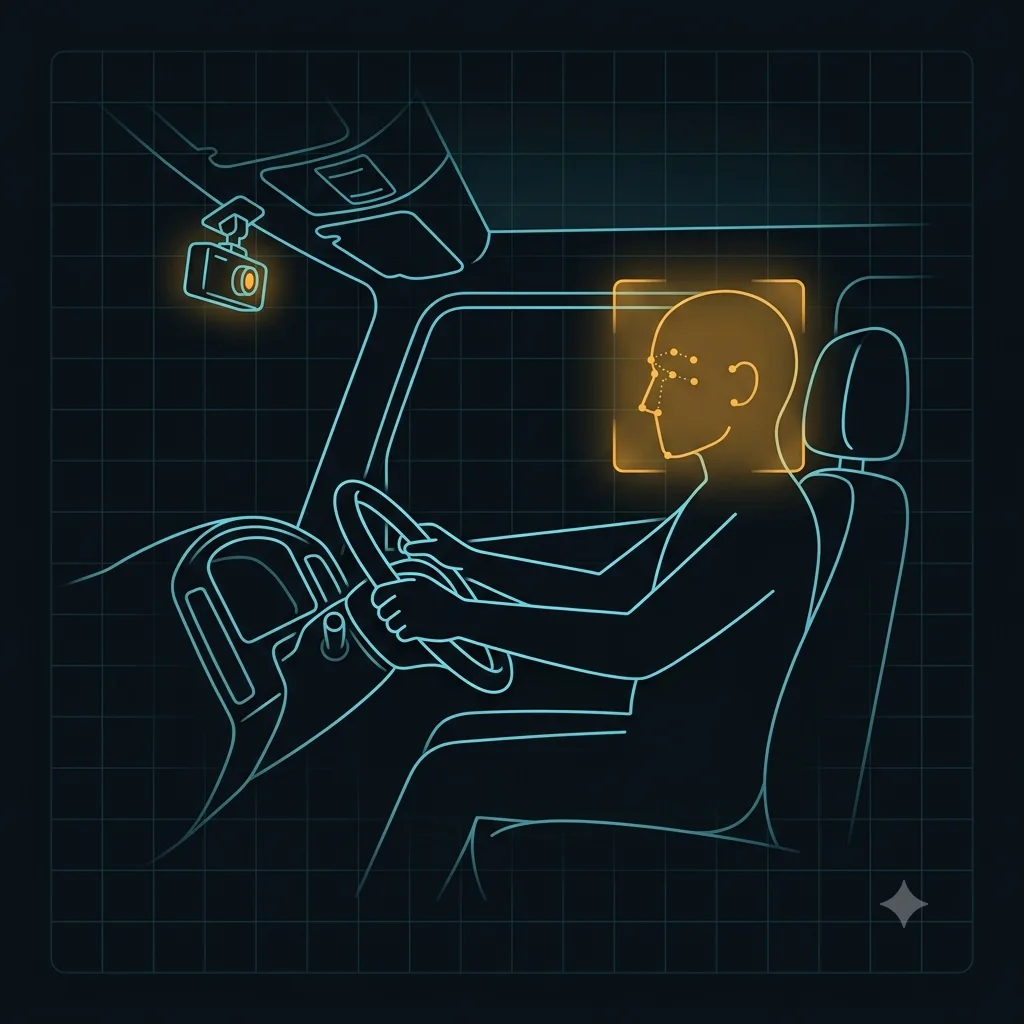
Somnolencia y fatiga
Los patrones de cierre de ojos y cabeceo se puntúan en la óptica de cabina y se ponderan según cuánto lleva el conductor al volante, de modo que un turno de noche largo eleva la sensibilidad. La inferencia se ejecuta en el dispositivo — el flujo de cabina nunca sale del vehículo.