Comparativa
MOS4 vs Balena
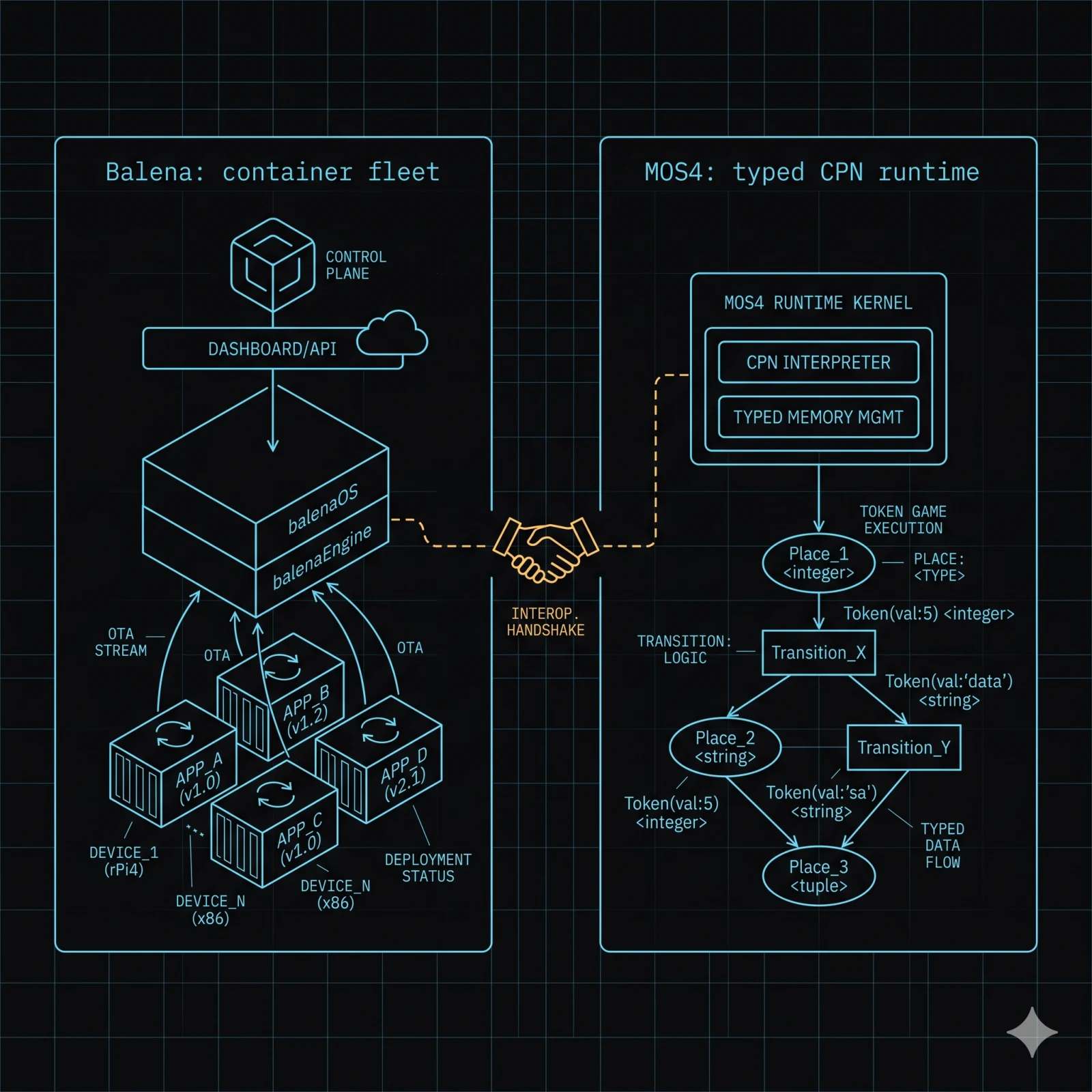
Balena despliega contenedores Docker a una flota. MOS4 es un runtime de micro services tipados con IPC protobuf nativo, ciclo de vida OCI sobre cgroups v2 y primitivas de dominio vehicular e industrial. Los dos pueden operar uno junto al otro.
Frontera
Gestión de flota de contenedores frente a runtime de micro services tipados.
Balena compone contenedores que se comunican por TCP y sockets Unix. MOS4 compone micro services tipados que se comunican por un bus protobuf nativo.
flowchart LR
subgraph Bal["Balena — flota de contenedores"]
B1[Contenedor A]
B2[Contenedor B]
B1 <-.TCP / sockets.-> B2
end
subgraph M["MOS4 — micro services tipados"]
M1[Micro servicio A]
M2[Micro servicio B]
M1 <-->|bus protobuf| M2
end Cara a cara
Comparación de capacidades.
Fuente — Balena desde balena.io; MOS4 desde /es/architecture.
SDK
Cinco lenguajes, presupuestos de imagen impuestos en CI.
MCM entrega contenedores OCI listos para desplegar en Python, Rust, Go, C y C++ que cubren llamadas de servicio en streaming, request-response y pub/sub de eventos contra un puente MQTT GNSS. Cada par lenguaje-escenario tiene un presupuesto de tamaño de imagen impuesto en CI — 15 celdas de matriz, puntos de partida de referencia probados.
FAQ
Las preguntas que más oímos.
-
¿Puede MOS4 ejecutarse dentro de un contenedor Balena?
Ejecutar MOS4 dentro de un contenedor gestionado por Balena es un patrón de coexistencia que algunos equipos han explorado. No es una topología de despliegue soportada por Munic. La ruta recomendada es MOS4 como runtime principal con su propia gestión de cargas OCI. Hable con ingeniería para discutir su topología específica.
-
¿Por qué usar IPC protobuf tipado en lugar de TCP contenedor a contenedor?
El esquema se verifica en tiempo de build con buf lint y cargo build, no en tiempo de ejecución tras un reinicio de contenedor. Un componente que llama mal a una interfaz falla en tiempo de compilación. El formato de cable es el mismo tanto si los componentes corren en un dispositivo como si lo hacen entre dispositivos.
-
¿Pierdo el aislamiento de contenedor con MOS4?
No. mos-container-manager (MCM) impone límites de CPU, memoria e I/O por contenedor vía cgroups v2 de Linux como contrato en tiempo de arranque. La supervisión de contenedores hace polling del endpoint /metrics de cada contenedor. Los namespaces de Linux siguen disponibles.
-
¿Cómo se compara la OTA de flota?
Balena despliega imágenes de contenedor — la unidad de actualización es el contenedor completo. mos-update despliega paquetes delta por componente: firmados con Ed25519, particiones A/B, rollback automático vía bootcount. La unidad reemplazable más pequeña es un único servicio, no una imagen completa. OTA por cohorte y canario vía el complemento cloud de Munic.
-
¿Es MOS4 la respuesta correcta si solo necesito gestión de flota de contenedores?
Si solo necesita desplegar imágenes Docker a una flota, Balena es la respuesta más simple. MOS4 es la respuesta correcta cuando el programa necesita IPC tipado entre componentes, primitivas de dominio vehicular o industrial, inferencia IA en dispositivo o OTA con granularidad de componente.
-
¿Puedo reutilizar archivos Docker Compose existentes?
Sí. MCM analiza archivos Docker Compose v3, de modo que los equipos con flujos de desarrollo basados en Compose pueden llevarlos a objetivos embebidos sin aprender una sintaxis de configuración nueva.
Conserve su gestor de flota, añada un runtime tipado.
Una llamada de 30 minutos con ingeniería. Mapearemos MOS4 sobre sus dispositivos Linux embebidos existentes.